https://mp.weixin.qq.com/s?__biz ... caea43&scene=27
[color=rgba(0, 0, 0, 0.9)]今天先总结一波自动驾驶得项目,因为看了一个自动驾驶得行业报告,激动坏了。
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]很新得报告
[color=rgba(0, 0, 0, 0.9)] 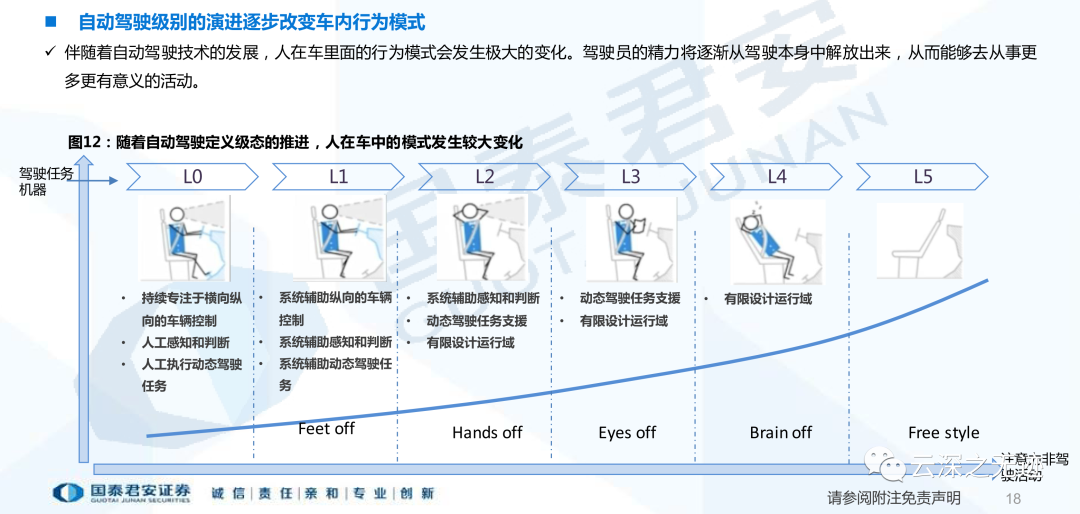
[color=rgba(0, 0, 0, 0.9)]对于自动驾驶得一个分级
[color=rgba(0, 0, 0, 0.9)] 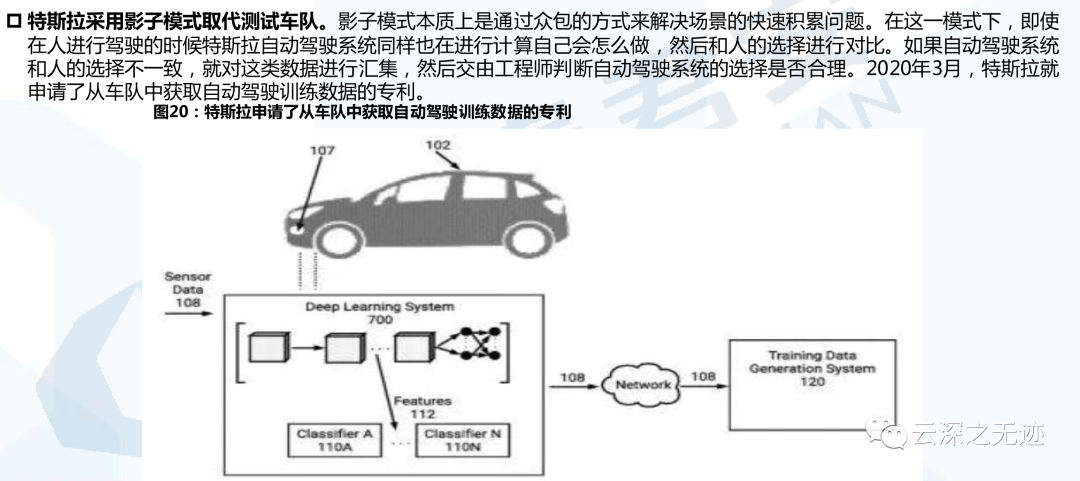
[color=rgba(0, 0, 0, 0.9)]特斯拉的驾驶数据获得
[color=rgba(0, 0, 0, 0.9)] 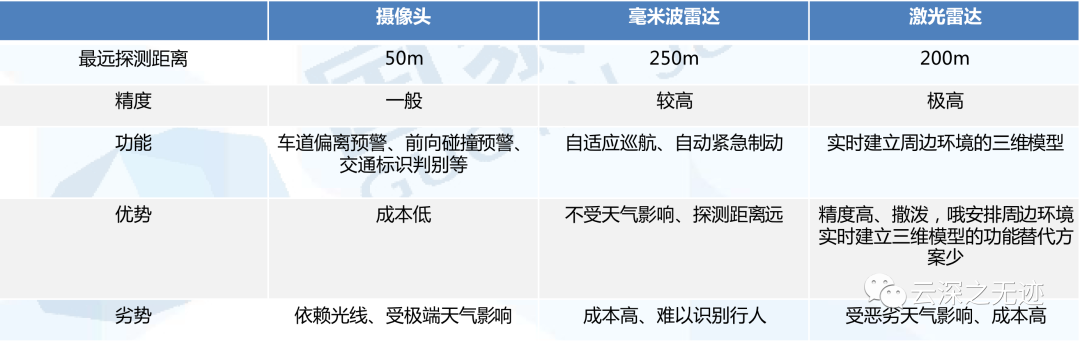
[color=rgba(0, 0, 0, 0.9)]无人驾驶的采用传感器
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]特斯拉自研芯片的特性
[color=rgba(0, 0, 0, 0.9)] 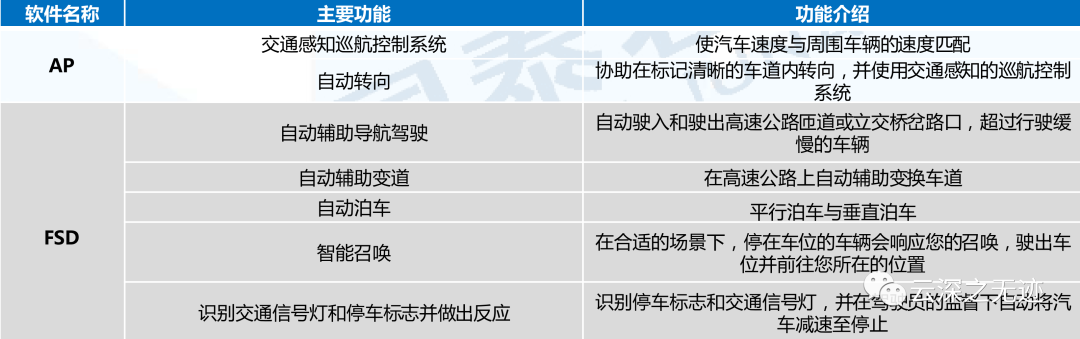
[color=rgba(0, 0, 0, 0.9)]软件的一些特有功能
[color=rgba(0, 0, 0, 0.9)]因为篇幅较长,我这里就不写了,总之是特斯拉是一家很酷的公司,从软件,制造,商业模式方方面面都在颠覆着传统的造车行业。
[color=rgba(0, 0, 0, 0.9)]我对自动驾驶技术也很是看好,但是目前来说各家的差异化做不到很大,缺乏真真正正的原创性,按照我的看法是在研究懂现在技术的基础上,从0开始研发一个属于自己的自动驾驶系统,可以在成本,扩展性,性能上面得到平衡(其实是我以后单干不了也可以找个厂打螺丝)。
[color=rgba(0, 0, 0, 0.9)]  [color=rgba(0, 0, 0, 0.9)]首先最多的star就是百度
[color=rgba(0, 0, 0, 0.9)]Apollo 7.0 包含 3 个全新的深度学习模型,以增强 Apollo 感知和预测模块的能力。该版本引入了Apollo Studio,结合Data Pipeline,提供一站式在线开发平台,更好地服务Apollo开发者。Apollo 7.0 还发布了基于以往仿真服务的 PnC 强化学习模型训练和仿真评估服务。目前来说,最新的是7的版本。
[color=rgba(0, 0, 0, 0.9)] 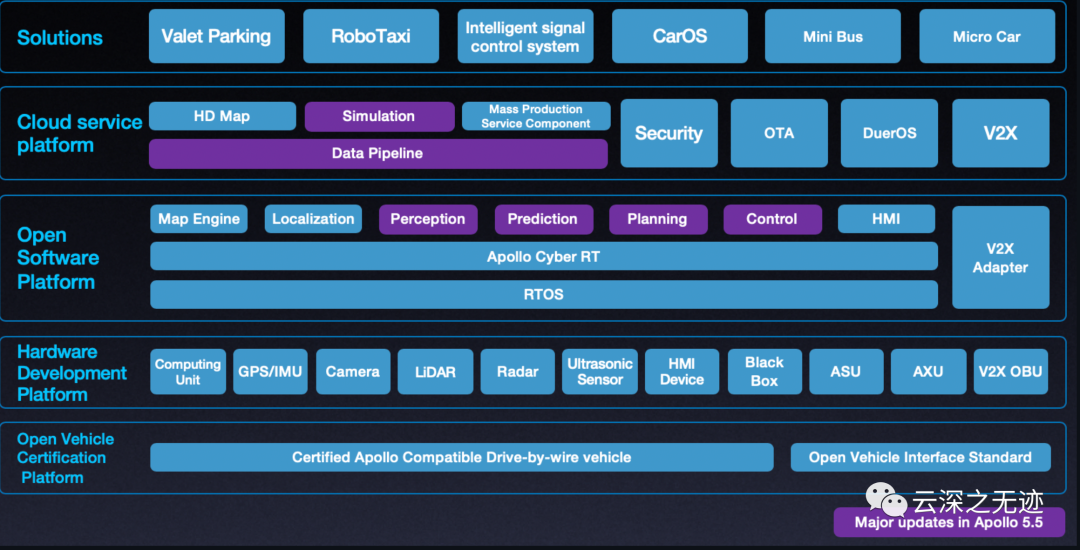
[color=rgba(0, 0, 0, 0.9)]5.5的版本是最酷的构架图
[color=rgba(0, 0, 0, 0.9)] 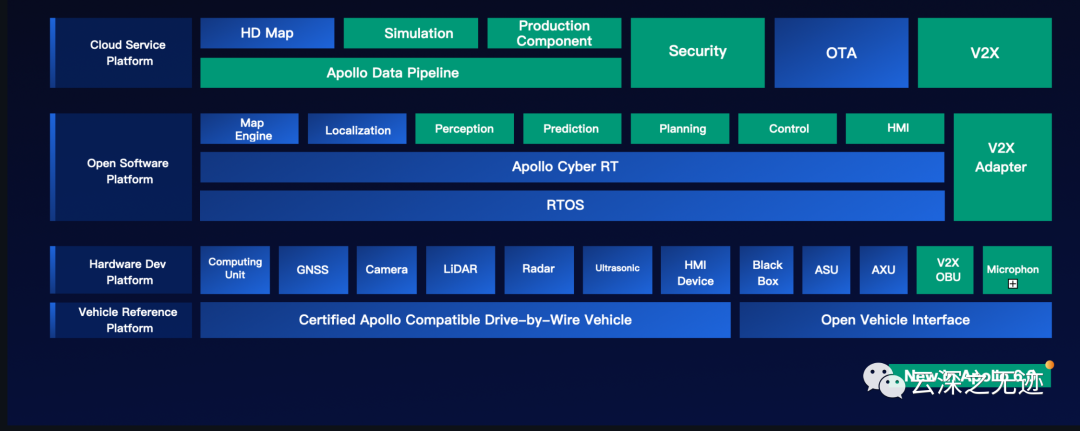
[color=rgba(0, 0, 0, 0.9)]6.0也酷
[color=rgba(0, 0, 0, 0.9)] 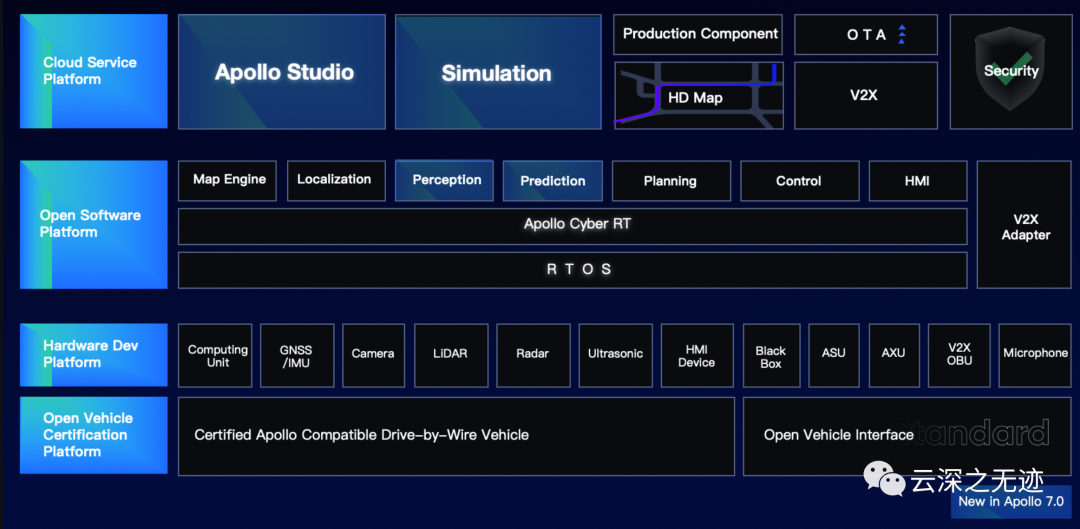
[color=rgba(0, 0, 0, 0.9)]7.0
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]这里是上层的的云服务层
[color=rgba(0, 0, 0, 0.9)] 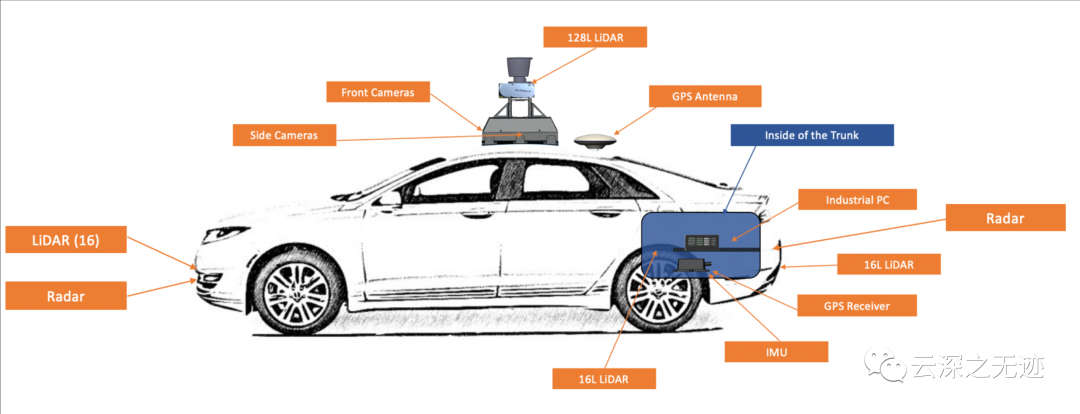 [color=rgba(0, 0, 0, 0.9)]这个是硬件 [color=rgba(0, 0, 0, 0.9)] 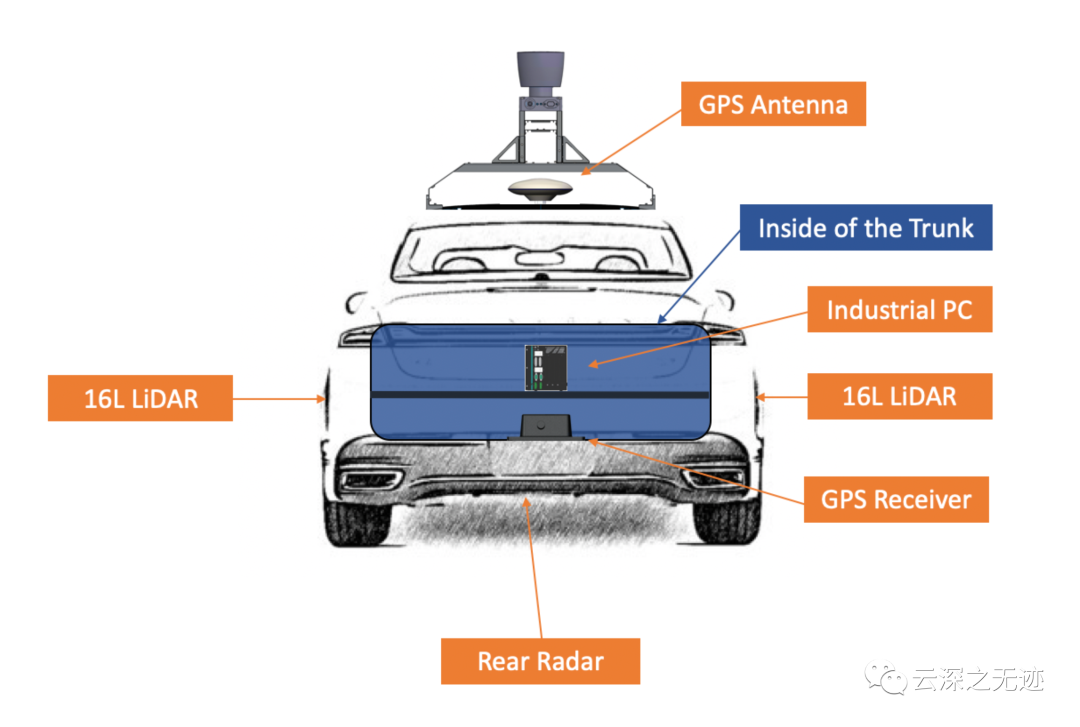
[color=rgba(0, 0, 0, 0.9)] 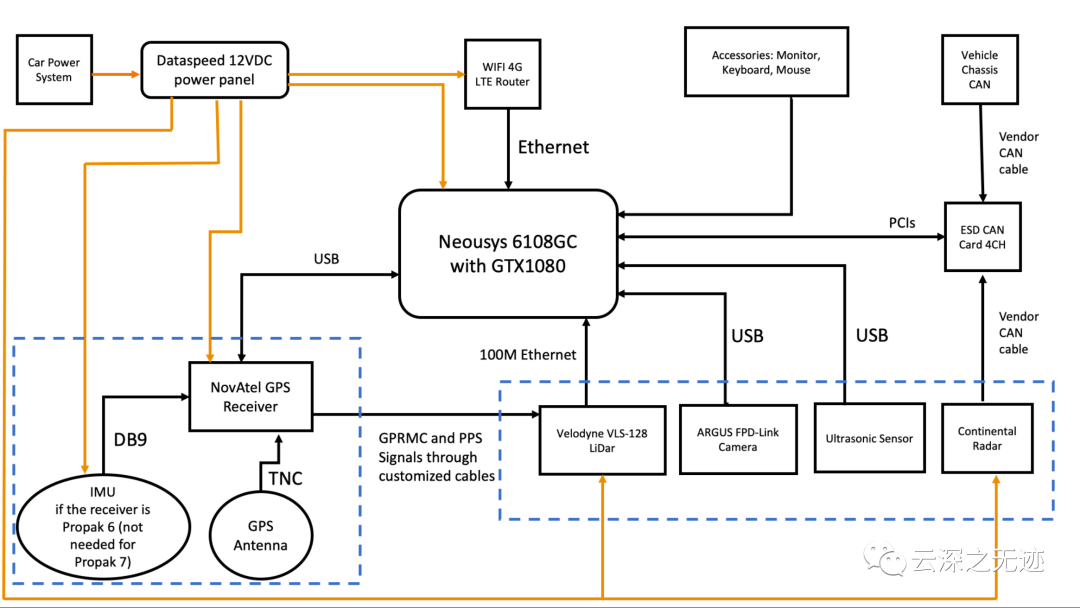
[color=rgba(0, 0, 0, 0.9)]硬件构架
[color=rgba(0, 0, 0, 0.9)] 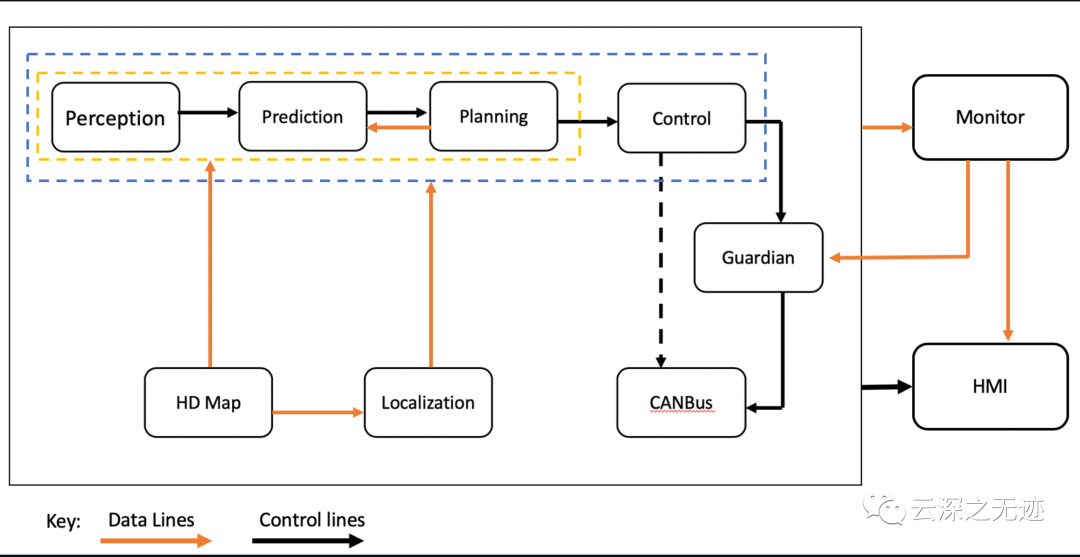
[color=rgba(0, 0, 0, 0.9)]软件构架
[color=rgba(0, 0, 0, 0.9)] 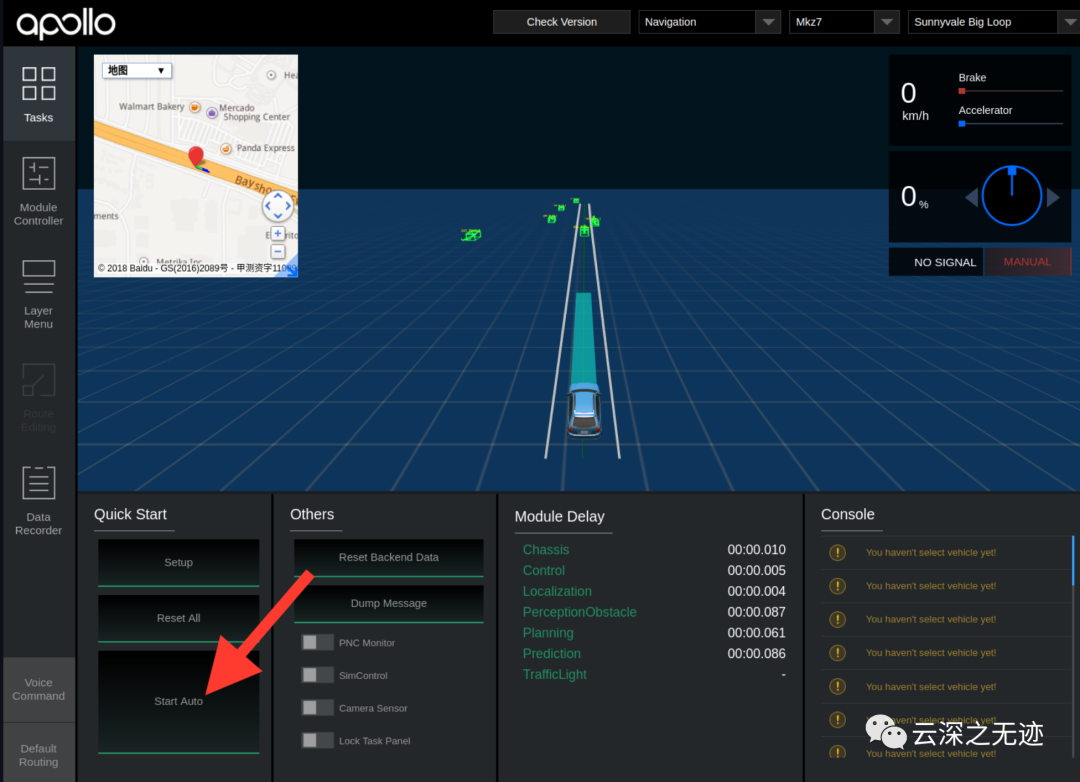
[color=rgba(0, 0, 0, 0.9)]内部的启动图,有点不高级
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]所有的代码都是使用CPP写成
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]庞大的代码怎么读?有个不错的项目是来说明Apollo的模块功能的。 [color=rgba(0, 0, 0, 0.9)]
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]之后我会记录一期
[color=rgba(0, 0, 0, 0.9)] 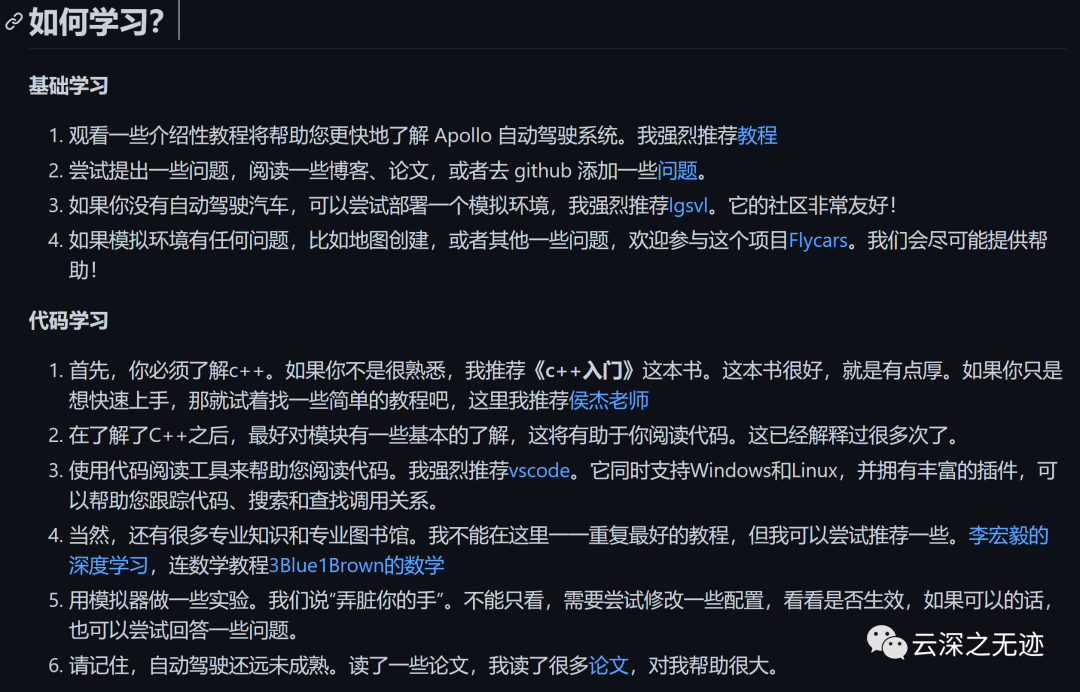
[color=rgba(0, 0, 0, 0.9)]这些个上面学习库的一些指南
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]如果对于上面的Apollo来说太大,可以使用一个玩具一样的东西来
[color=rgba(0, 0, 0, 0.9)]驴车我写了一些代码分析,但是我没有写完。
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]这个项目可以放的优先级很靠前
[color=rgba(0, 0, 0, 0.9)] 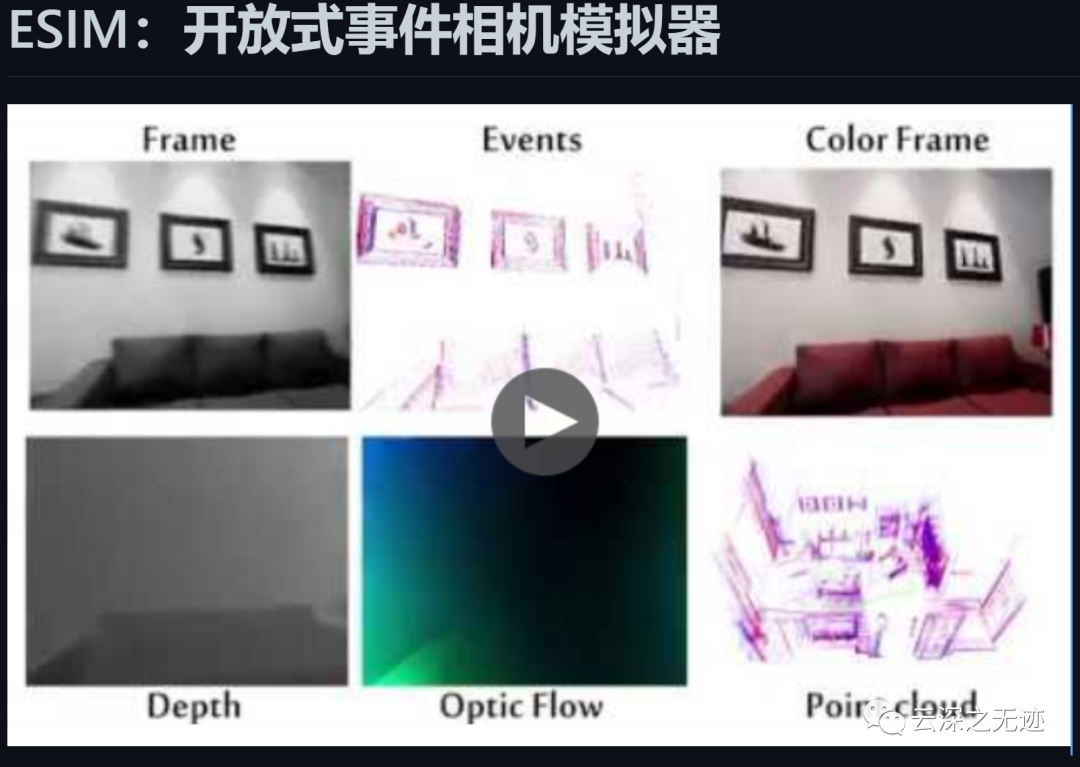
[color=rgba(0, 0, 0, 0.9)]买不起事件相机的我,也找到了相应的模拟器
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]这个是大学的封面
[color=rgba(0, 0, 0, 0.9)] 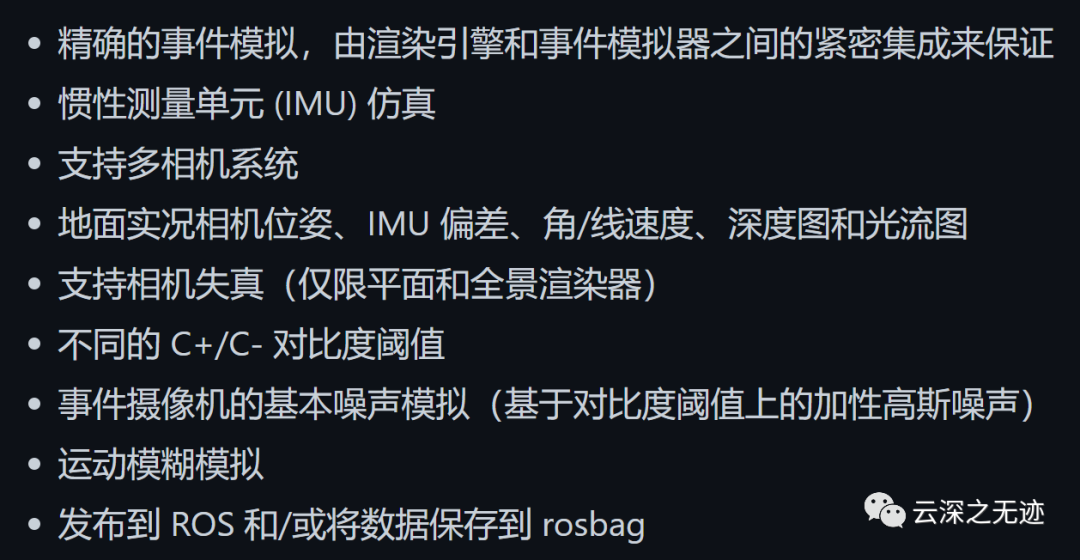
[color=rgba(0, 0, 0, 0.9)]特性
https://github.com/uzh-rpg/rpg_esim/
https://github.com/protontypes/awesome-robotic-tooling[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]令人awesome的机器人工具库
[color=rgba(0, 0, 0, 0.9)] 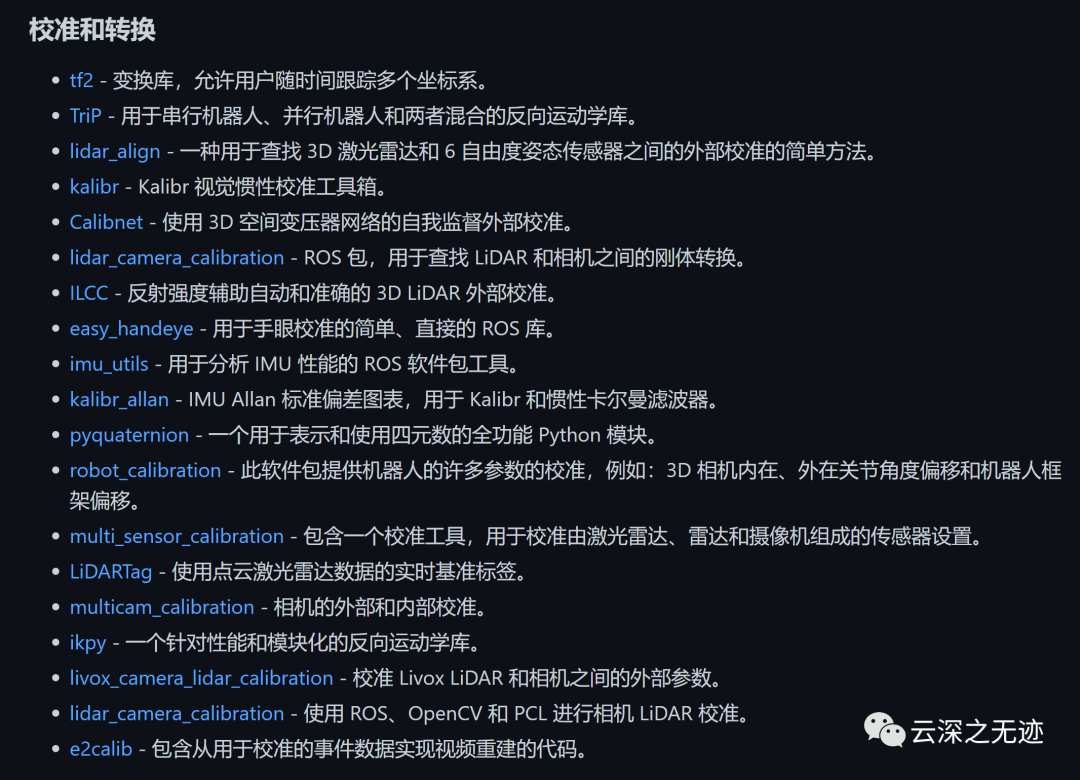
[color=rgba(0, 0, 0, 0.9)]全的一马p
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]这个是Python实现的机器算法库,是接下来的算法解析的来源
[color=rgba(0, 0, 0, 0.9)] 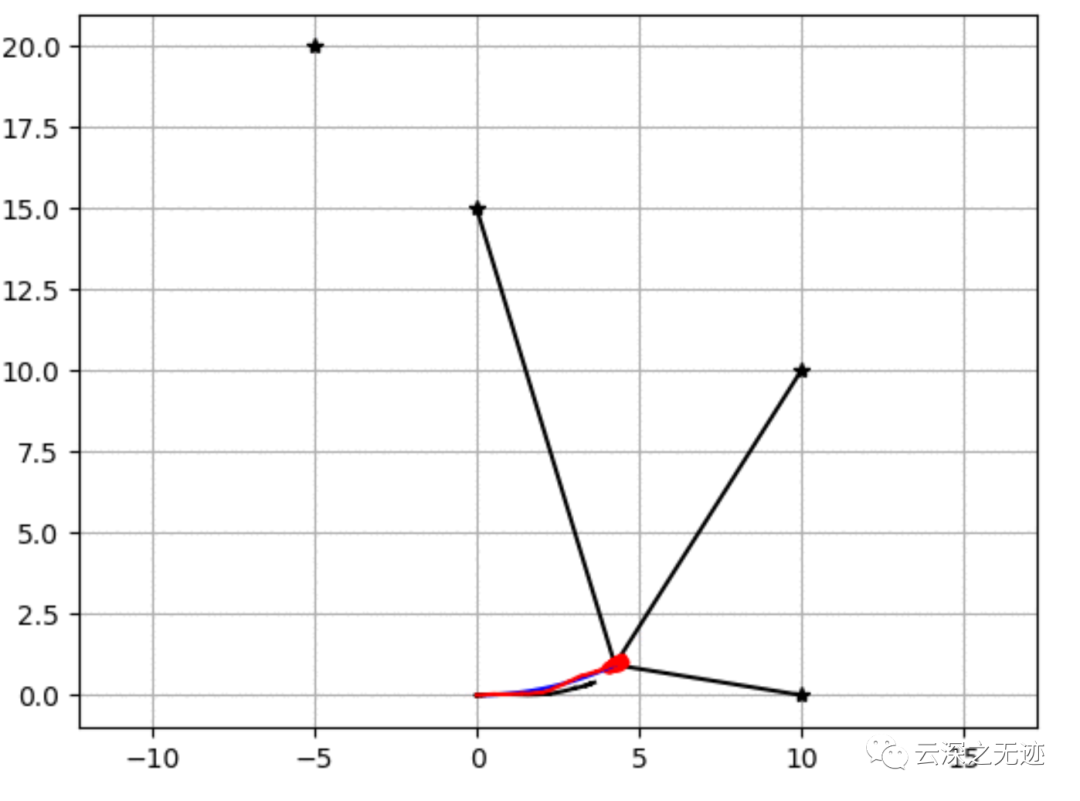
[color=rgba(0, 0, 0, 0.9)]粒子过滤
[color=rgba(0, 0, 0, 0.9)] 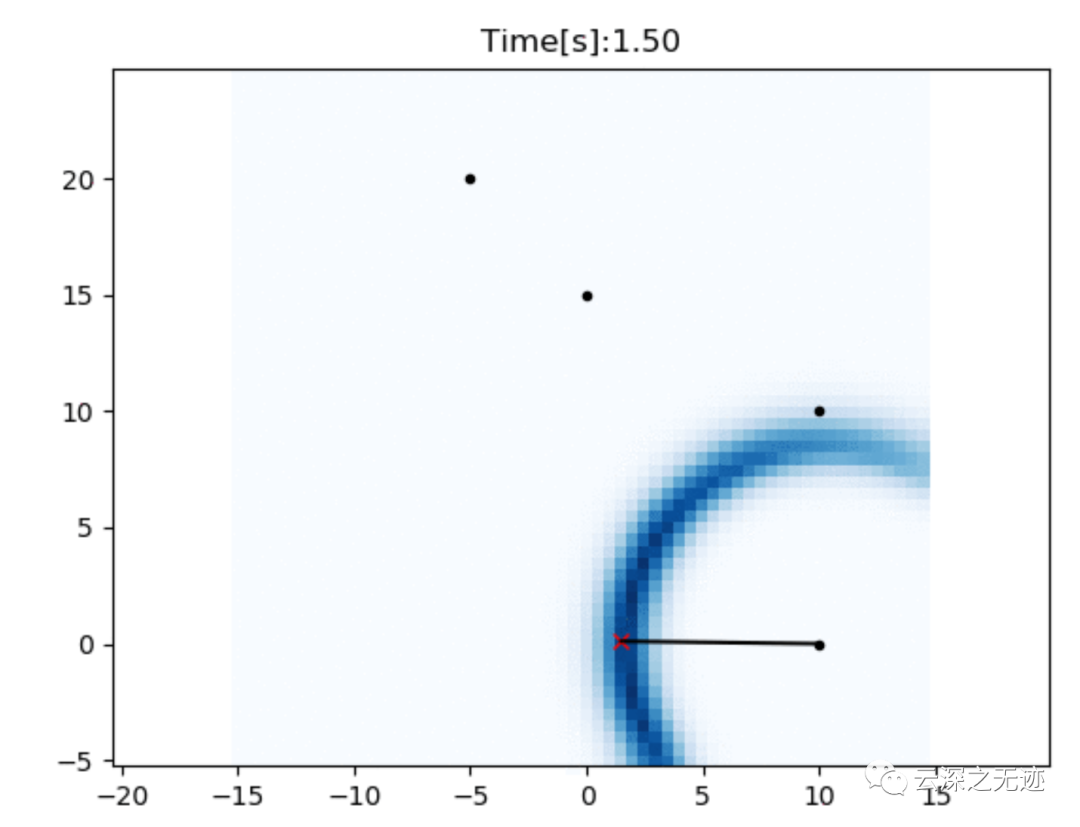
[color=rgba(0, 0, 0, 0.9)]直方图滤波
[color=rgba(0, 0, 0, 0.9)] 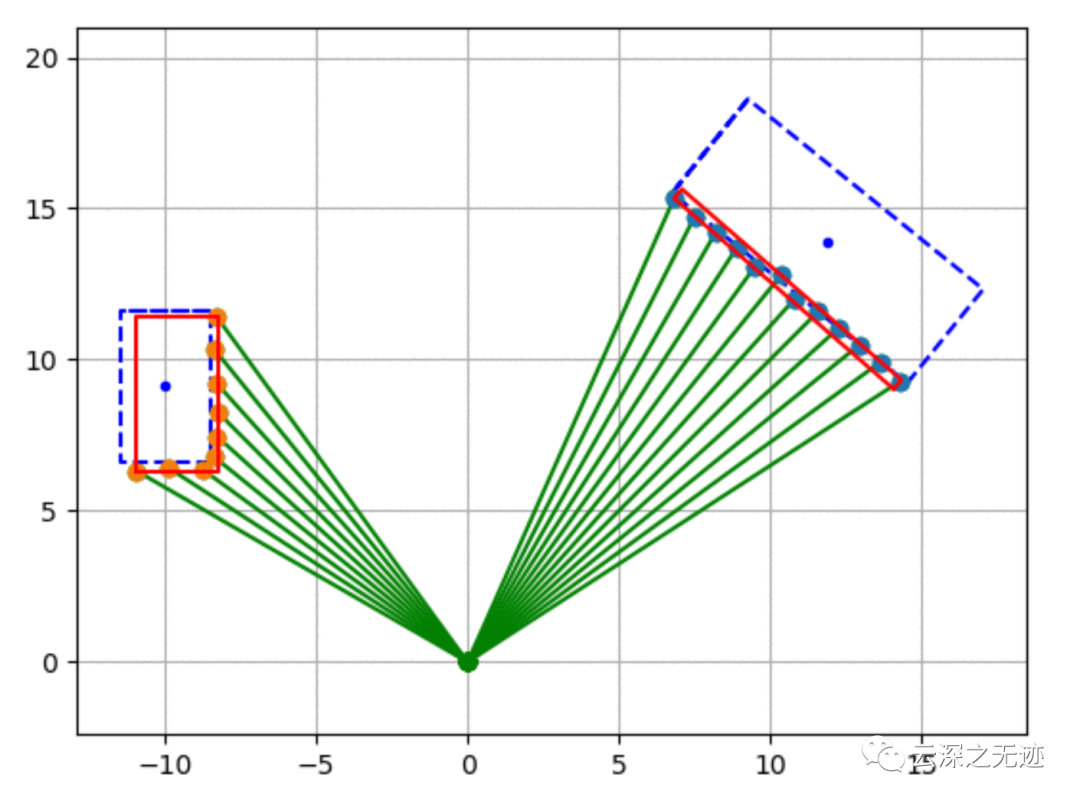
[color=rgba(0, 0, 0, 0.9)]矩形拟合
[color=rgba(0, 0, 0, 0.9)] 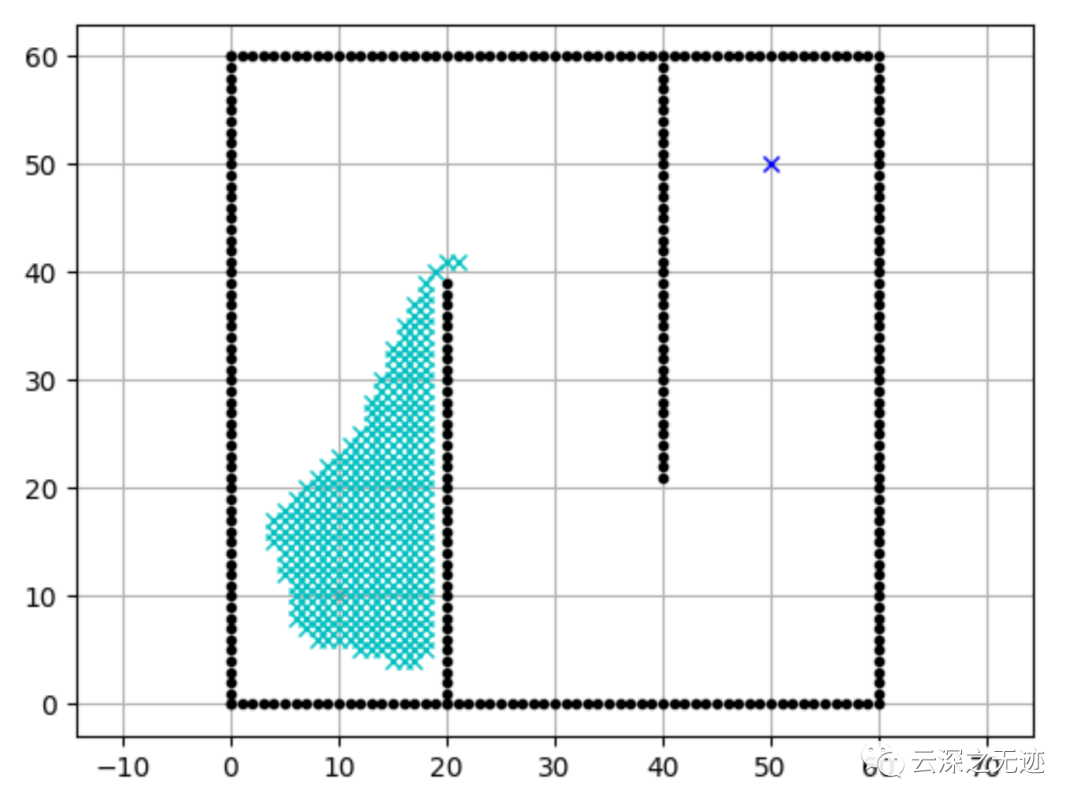
[color=rgba(0, 0, 0, 0.9)]A*,怎么会有这么棒的东西
[color=rgba(0, 0, 0, 0.9)]
[color=rgba(0, 0, 0, 0.9)]这个是一个小的自动驾驶demo:自动驾驶汽车(汽车也叫汽车和环境汽车、自动驾驶汽车是一种单独的人工输入环境)。自动驾驶汽车的车辆和无人驾驶汽车结合了多种技术来现场,包括雷达、先进的计算机控制系统和GPS导航、导航信息、导航信息,以及合适的识别物和障碍物。 https://github.com/akshaybahadur21/Autopilot
[color=rgba(0, 0, 0, 0.9)] 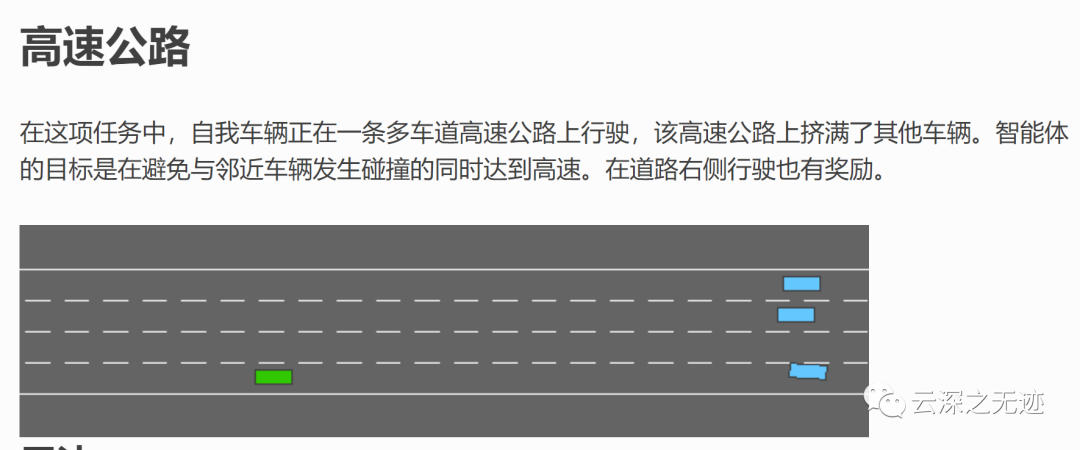
[color=rgba(0, 0, 0, 0.9)]highway这个库是一个简单的自动驾驶库可以研究
https://highway-env.readthedocs.io/en/latest/environments/highway.html
[color=rgba(0, 0, 0, 0.9)] 
[color=rgba(0, 0, 0, 0.9)]最后一个是jetbot:
[color=rgba(0, 0, 0, 0.9)] 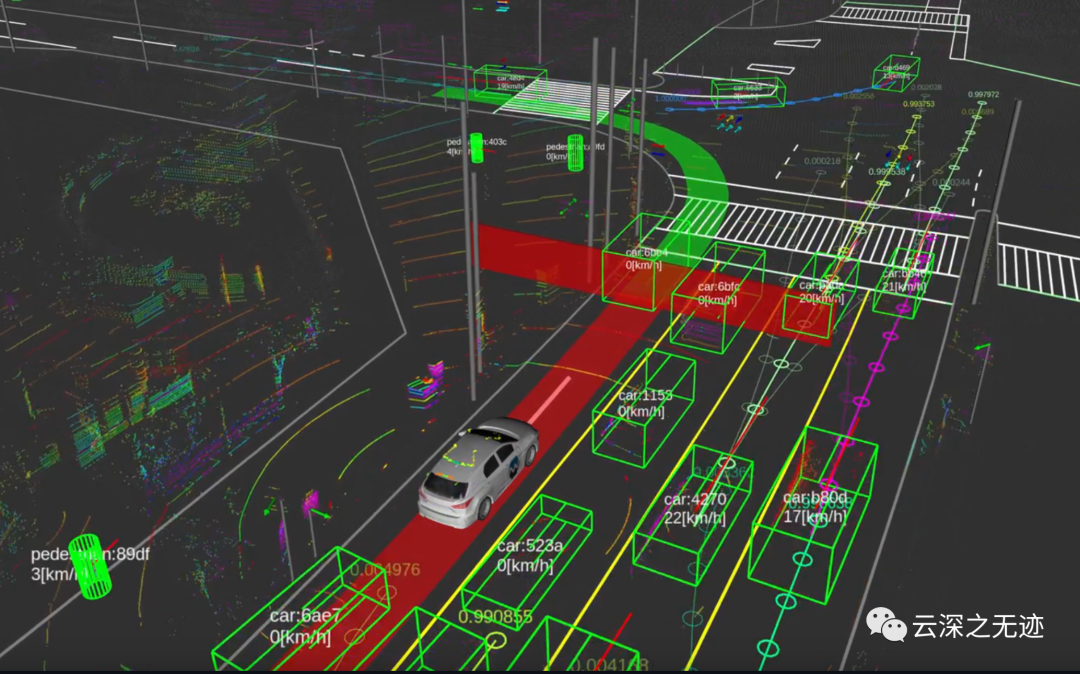
[color=rgba(0, 0, 0, 0.9)]Autoware——世界领先的自动驾驶开源软件项目
[color=rgba(0, 0, 0, 0.9)] 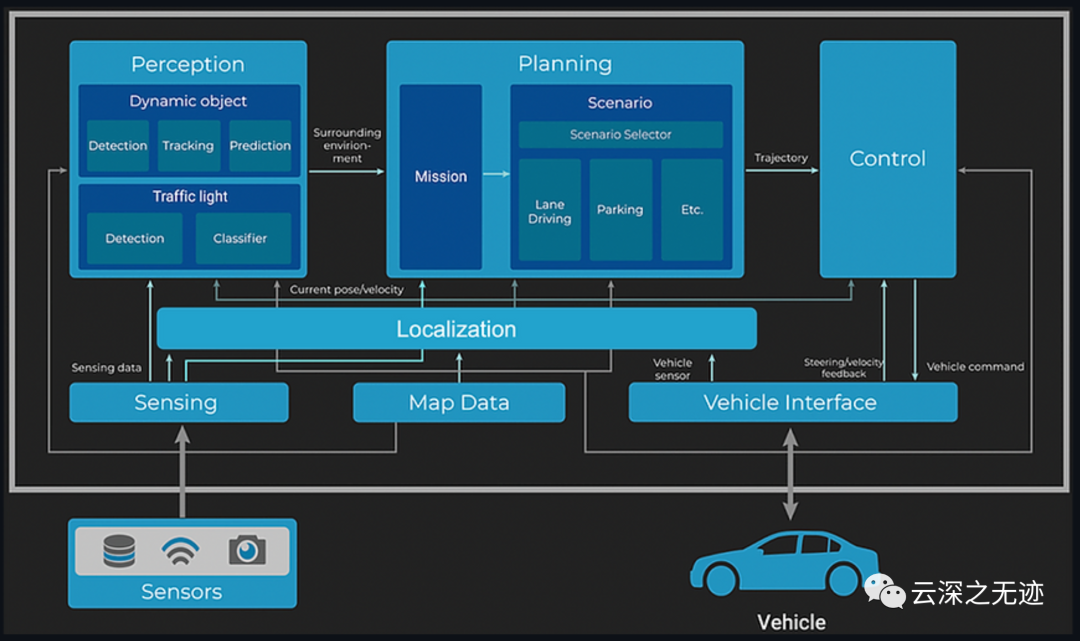
[color=rgba(0, 0, 0, 0.9)]Autoware 是用于自动驾驶车辆的开源软件堆栈,建立在机器人操作系统 (ROS)之上。它包括驾驶自动驾驶汽车的所有必要功能,从定位和目标检测到路线规划和控制,旨在让尽可能多的个人和组织为自动驾驶技术的开放式创新做出贡献。
https://github.com/autowarefoundation/autoware
[color=rgba(0, 0, 0, 0.9)] 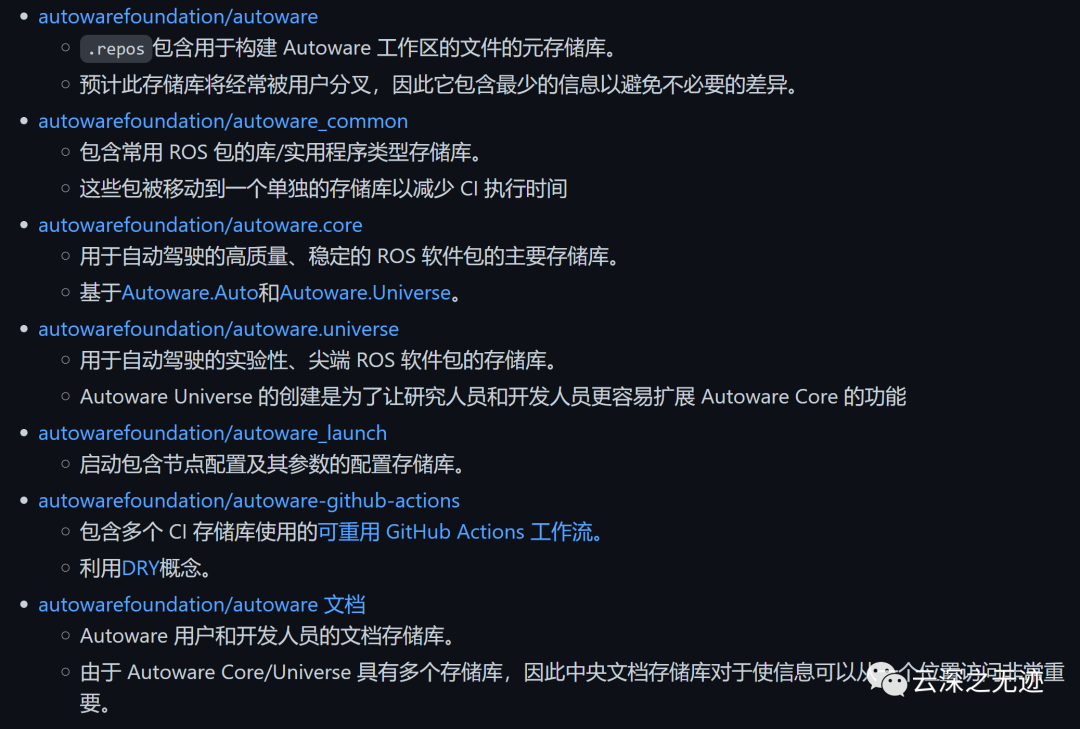
[color=rgba(0, 0, 0, 0.9)]所有的依赖库,现在是ROS2构建的,其实还有一个ROS1的库。
|


 发表于 2024-2-26 16:15:43
发表于 2024-2-26 16:15:43